在當(dāng)今工程行業(yè),項(xiàng)目規(guī)模日益龐大、技術(shù)日趨復(fù)雜、協(xié)作方不斷增加,傳統(tǒng)的依賴紙質(zhì)文檔、電子表格和零散溝通的管理模式已難以應(yīng)對(duì)。工程項(xiàng)目管理軟件應(yīng)運(yùn)而生,并已成為提升項(xiàng)目管理效率、優(yōu)化工程管理服務(wù)質(zhì)量的關(guān)鍵所在。它不僅僅是工具,更是驅(qū)動(dòng)項(xiàng)目成功、實(shí)現(xiàn)管理現(xiàn)代化的核心引擎。
一、工程項(xiàng)目管理軟件的核心價(jià)值:從分散到協(xié)同,從被動(dòng)到主動(dòng)
工程項(xiàng)目管理軟件通過一個(gè)統(tǒng)一的數(shù)字平臺(tái),整合了項(xiàng)目從規(guī)劃、設(shè)計(jì)、采購(gòu)、施工到交付運(yùn)維的全生命周期數(shù)據(jù)與流程。其核心價(jià)值體現(xiàn)在:
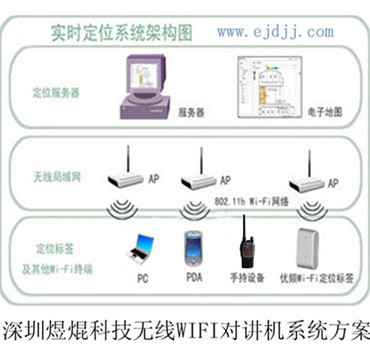
- 信息集中化與透明化:將合同、圖紙、進(jìn)度計(jì)劃、成本數(shù)據(jù)、質(zhì)量安全記錄、變更指令等所有信息集中存儲(chǔ)、實(shí)時(shí)更新。所有授權(quán)干系人(業(yè)主、監(jiān)理、總包、分包)都能在同一平臺(tái)上獲取單一事實(shí)版本,極大減少了信息孤島、誤解和版本混亂,實(shí)現(xiàn)了項(xiàng)目信息的“一圖總覽”。
- 流程標(biāo)準(zhǔn)化與自動(dòng)化:軟件內(nèi)置了最佳實(shí)踐流程模板,如審批流、變更管理流程、支付申請(qǐng)流程等。這使得工作流轉(zhuǎn)自動(dòng)化,減少了人為延誤和疏漏,確保了管理動(dòng)作的規(guī)范性和一致性,提升了工程管理服務(wù)的專業(yè)水平。
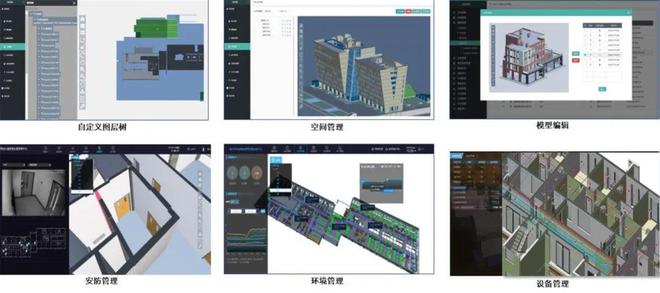
- 決策數(shù)據(jù)化與智能化:軟件能夠?qū)崟r(shí)采集項(xiàng)目數(shù)據(jù),并通過圖表、儀表盤等形式進(jìn)行可視化分析。管理者可以隨時(shí)掌握進(jìn)度偏差、成本超支、資源負(fù)荷等關(guān)鍵指標(biāo),從“憑經(jīng)驗(yàn)”決策轉(zhuǎn)向“用數(shù)據(jù)”決策,提前預(yù)警風(fēng)險(xiǎn),實(shí)現(xiàn)主動(dòng)式管理。
二、提升項(xiàng)目管理效率的具體應(yīng)用場(chǎng)景
- 進(jìn)度管理:利用甘特圖、關(guān)鍵路徑法(CPM)等工具,精細(xì)編制和動(dòng)態(tài)跟蹤進(jìn)度計(jì)劃。軟件能自動(dòng)關(guān)聯(lián)任務(wù)依賴關(guān)系,當(dāng)某一環(huán)節(jié)延遲時(shí),智能預(yù)警并直觀展示對(duì)總工期的影響,便于及時(shí)調(diào)整資源、優(yōu)化工序。
- 成本與合同管理:實(shí)現(xiàn)預(yù)算、合同、實(shí)際支出的動(dòng)態(tài)對(duì)比。軟件可自動(dòng)歸集材料、人工、機(jī)械等費(fèi)用,實(shí)時(shí)生成成本報(bào)告,精確控制變更與簽證,防止成本失控。簡(jiǎn)化請(qǐng)款、計(jì)量、支付流程,加快資金周轉(zhuǎn)。
- 質(zhì)量與安全管理:支持移動(dòng)端現(xiàn)場(chǎng)檢查,發(fā)現(xiàn)問題可即時(shí)拍照上傳、指定整改責(zé)任人、設(shè)定整改期限并自動(dòng)跟蹤閉環(huán)。所有檢查記錄、整改報(bào)告在線存檔,形成可追溯的質(zhì)量安全檔案,全面落實(shí)管理責(zé)任。
- 文檔與溝通協(xié)同:所有項(xiàng)目文檔集中分類管理,支持在線預(yù)覽、批注和版本控制。集成郵件、即時(shí)消息、任務(wù)@提醒等功能,確保溝通記錄可查,任務(wù)指令清晰直達(dá),極大提升了跨部門、跨單位的協(xié)作效率。
- 供應(yīng)鏈與物料管理:從需求計(jì)劃、采購(gòu)招標(biāo)、訂單跟蹤到進(jìn)場(chǎng)驗(yàn)收、庫(kù)存管理,實(shí)現(xiàn)全流程數(shù)字化。通過與BIM模型關(guān)聯(lián),可實(shí)現(xiàn)材料需求的精準(zhǔn)算量和采購(gòu),減少浪費(fèi)和現(xiàn)場(chǎng)積壓。
三、對(duì)工程管理服務(wù)的深刻變革
專業(yè)的工程管理服務(wù)(如項(xiàng)目管理公司、監(jiān)理單位)在引入項(xiàng)目管理軟件后,其服務(wù)模式和價(jià)值也發(fā)生了質(zhì)的飛躍:
- 從“監(jiān)工”到“戰(zhàn)略顧問”:軟件將團(tuán)隊(duì)從繁瑣的文書、報(bào)表和協(xié)調(diào)會(huì)議中解放出來,使其能投入更多精力進(jìn)行風(fēng)險(xiǎn)預(yù)判、價(jià)值工程分析和戰(zhàn)略決策支持,服務(wù)層次得到提升。
- 服務(wù)交付物標(biāo)準(zhǔn)化、可視化:定期的進(jìn)度報(bào)告、成本分析報(bào)告、風(fēng)險(xiǎn)報(bào)告等均可通過軟件一鍵生成,格式統(tǒng)一、數(shù)據(jù)準(zhǔn)確,極大提升了服務(wù)交付物的專業(yè)性和客戶滿意度。
- 知識(shí)沉淀與組織賦能:項(xiàng)目結(jié)束后,所有的過程數(shù)據(jù)、經(jīng)驗(yàn)教訓(xùn)都沉淀在軟件系統(tǒng)中,形成企業(yè)的知識(shí)資產(chǎn)庫(kù)。這有助于未來項(xiàng)目的復(fù)盤與優(yōu)化,實(shí)現(xiàn)工程管理服務(wù)能力的持續(xù)迭代與提升。
四、選擇與應(yīng)用的關(guān)鍵考量
選擇工程項(xiàng)目管理軟件時(shí),應(yīng)著眼于:與企業(yè)現(xiàn)有流程的匹配度、系統(tǒng)的靈活性與可配置性、移動(dòng)端支持能力、數(shù)據(jù)安全性與供應(yīng)商的持續(xù)服務(wù)能力。成功的應(yīng)用絕非簡(jiǎn)單的軟件安裝,更需要頂層設(shè)計(jì)、流程重塑和全員培訓(xùn),確保技術(shù)與管理的深度融合。
###
在數(shù)字化轉(zhuǎn)型浪潮下,工程項(xiàng)目管理軟件已從“可選工具”變?yōu)椤氨貍浠A(chǔ)設(shè)施”。它通過技術(shù)手段固化了優(yōu)秀的管理實(shí)踐,將碎片化的工程管理服務(wù)整合為高效、透明、可控的有機(jī)整體。對(duì)于任何致力于提升核心競(jìng)爭(zhēng)力、保障項(xiàng)目成功交付的工程建設(shè)方和服務(wù)提供方而言,投資并善用一款合適的工程項(xiàng)目管理軟件,無疑是把握未來、決勝市場(chǎng)的關(guān)鍵戰(zhàn)略選擇。它不僅是提升效率的“加速器”,更是驅(qū)動(dòng)工程行業(yè)邁向精細(xì)化、智能化管理的核心引擎。